 in Russian
in Russianin Russian
Modern shipbuilding is not uniform in design solutions of hull form and ship architecture. Formally it shows that we have not unified engineering approach for fluidmechanics optimization of external excitations for the best ship seaworthiness in stormy condition. Now navigation uses more and more prior warning of dangerous sea phenomena (weather forecast). Often it results in either long waiting of good weather or unjustified risk.
The modern fleet, as a rule, has fundamental advantage over medieval vessels and old-time steamship because any seagoing ship has excess reserve of main engines power. Reliable functioning of the main engines allows for navigator to maneuver actively for prevention of broaching, surf-riding. It permits in arising of dangerous collision to restore the original condition of sailing: to achieve again and again target propulsion or to optimize course and speed for minimizing ship motion in stormy conditions. At the same time excess of ship engines power results in increase of fuel rate at voyage on a calm sea. On a stormy sea all ships decrease speed. They have to actively use main engines and steering engines solely for saving of stormy sailing, when hurricane checks technical reliability of all ship’s mechanisms and examines navigators from the point of view of good maritime experience.
In the paper it is reasonable to return to glorious historical time when shipbuilding masterpieces were achieved from the geography discovery and far seagoing epoch. That time consistent design and unity of ship with ocean nature were entrusted solely to the experienced captains and the most authoritative seafarers. At this way it is possible to obtain main conditions of stormy sailing; to note recommendations for course and speed choosing for efficient solving for purpose in hand in any conditions (complex, storm, ice, etc.). By the way we can discover key elements of ship hull and common architecture for new perspective ship.
1.1.Mathematical models of most dangerous storm waves and their fluid mechanics influences on the surface ship |
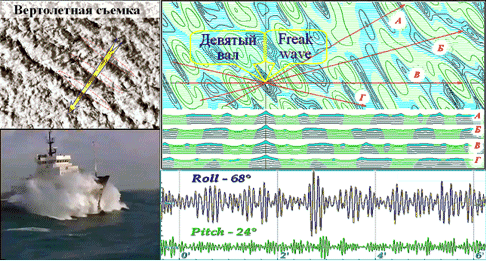
The maintenance of stormy seakeeping is possible if fluid mechanics processes in group structures of trochoidal waves and breaking crests of freak-waves are taken into account well.
Within Gerstner’s theory velocity and geometric shape for gravitational waves field at deep sea are estimated by parametric description of liquid particles trajectories moving in Lagrange’s (local) coordinates by cycloids with variable radius:
 (1)
(1)
Progressive waves bring the serious danger for uncontrollable ship without speed since head currents at top and trough waves can turn the ship to the beam sea. After this hard blow to ship board and follow drag the body to intensive vertical flow under breaking wave crest is possible.
On deep water trochoidal waves never go one at a time. Freak-waves are formed after merging in groups. These freak-waves are higher but they are not more dangerous from the fluid mechanics influence point of view because they lose self velocities.

Empirical synthesis of group structure for trochoidal waves is possible as a result of superposition of regular waves with phase factor: x' = –0,889 • x, and several smaller height: a' = a/1,286.
 (2)
(2)Freak-wave proves itself as a standing wave. Fast moving and large progressive waves (before and after such “Ninth billow”) able to break on shipboard by power high speed flows with hard shocks on shoulder, sharp motion rolling and dangerous of catastrophically diving under “Ninth billow” with big trim by the head at high speed (broaching).
1.2. Navigation peculiarities in storm |
In practical navigation waves models which contain superposition of several independent wave systems are traditionally used. The space model of the storm waves can be formed from group packages in which length of the wave front that more, than height factor less 2-3 freak-waves pass along a ship board at go ahead. Just after that head-on collision with large wave (provided that helmsmen guides the ship not on each rough) is possible. Accepting typical period of the storm waves in Ohotskoye sea equal to 8 s we have to have prediction of collision with large wave approximate 1-1.5 min. It is possible now with the help of modern computers.
Sea storm sailing is not catastrophic. Navigator always can choose big areas with flattening waves, where active maneuvering is permissible for avoiding meeting with specifically large or freak-wave.
However, fluidmechanics conditions of sea storm become vastly dangerous, if sea depth is less then length of storm wave. In this case storm waves save the group structure, but their fronts are extended, that obstructs avoiding the largest waves. Freak-waves already do not behave like standing wave. They move to a long distance when wave crests are intensively broke. In this case they can shock shipboard with extreme phase velocity. At gale in Okhotskoye sea with typical wave period 8 sec we can expect direct blows of 12-metre waves with speed more than 20 knots. It faces the prospect of disaster effects to any ship. Exactly such stormy conditions for sailing are always typical at near seaside of coast; on anchor positions; and shallow waters, where fisheries and coastwise tonnage spend navigation.
Operational efficiency of the ship depends on her seagoing conditions, such as total intensity of negative influence on ship hull and superstructures affected by storm wind and waves. If forces influence of environment is big than ship loses possibility to move in the given direction and to use equipment and arms. Design conditions for sailing in calm weather are much simpler. However in this case it is impossible to neglect by stormy seakeeping (at least for keeping of well-timed possibility of deviation from unpredictable dangerous sea phenomena).
Seagoing in Far East Russia is complicated besides storm and ice condition by absence of marine ports of refuge.

2.1. Storm way on head/follow seas |
Bows on motion in stormy conditions is only one possible way of safety navigation in conditions of hurricane wind and heavy waves. Keeping on course in stormy conditions requires special activity from helmsman (autopilot) and high load from main engine and steering engine (fig.4).
In case of damage of main engine or steering engine passive way to keep necessary course in stormy conditions is possible only with the help of special storm sails or floating anchors (as in case of old sailing ships and ships with relatively small engine power). Pitching and longitudinal hull tensions reach extreme values on this course. More speed results in sharp pitching, dangerous of destructive blows of head seas in big bow shoulders, deck and superstructures as well as slamming and deep burying of bow deck under the waves (fig.4).
On following seas pitching becomes fluent. Ship gets possibility to be like dolphin (it is free motion with the speed of stormy wave propagation). It is very dangerous sailing conditions.
On follow seas course the ship must keep full possible speed ahead, because flow from propellers (heaps up the rudder blade) has to be rather intensive. In this case wave crest overtaking the ship cannot to weaken or to reverse control action of rudder blade. If there is any doubt in good operation of steering arrangement than watch officer has to go on stern deck for control screw working and make sure that fast turbulence flow under screw is not suppressed during afterrake heaving on crest of large follow wave. If this condition is fail (it is often for fishing vessels weak engine), then helmsman can get fast turn instead of keeping of right course. It faces fast capsizing (broaching effect).

2.2. Speed ahead on bow/quartering seas |
Way on head seas is accompanied with sharp and exhaust pitching. If seaworthiness quality of ship permits (no bulb and big flare at bow) then it is possible to choose beidwind course in stormy conditions. The ship takes propulsion and begins to trace the lengthened wave surface upon wholly moderate rolling.
Operating ship engines provide for necessary position of afterrake relatively average sea level. It provides general efficiency of propeller and maneuverability. It is impossible to get hard and controlled positioning relatively sea surfaces for bow and stern simultaneously. At least ship bow would be completely free and allows free yawing and heaving without any blows during pitching processes.
Stormy way on headquarter seas (backstay) is very important for runaround from typhoon or for speed up living of eye. We have all necessary conditions for this: pitching and rolling become fluent, ship speed increases due to energy of following waves. However if underwater hull shape, freeboard volume, propulsion and steering machines have not special stormy optimization, than headquarter course becomes exceedingly dangerous.
2.3. Emergency sailing or special conditions at beam seas |
Minimal water volume arises on upper deck if the ship on deep sea, and kept the course or have a freely sailing on beam seas. This promotes by very high transverse stability; by the symmetry of hull form comparatively midship frame; by presence high raked stem and spreading freeboard in extremity and middle part of hull. If ship be capable to keep a full speed ahead, that special requirements to stern lines can’t presented until the shipboard capable to reflect whole energy stormy waves.
Hydrodynamics of such sail is related with ability of ship to keep upper deck on parallel with the surfaces of storm waves. It is quite applicable for boats or small vessels with open decks. But such condition of stormy sailing is not good for large ships, because sharp rolling with large amplitude in rate of stormy waves results in unbearable live condition for crew, and sufficient hull strength cannot be ensures.
At the same time we have not design and operational contradictions in minimization of forces influence from stormy waves in conditions of beam seas sailing (Fig.7). Specifically if ship has a small initial static stability, and natural rolling period is significantly bigger of storm waves period, than amplitude of rolling decreases and storm waves begin gush over upper decks. The last creates special fluid mechanics effect of decreasing of stormy force influences on shipboard or even complete compensation of the ship rolling.

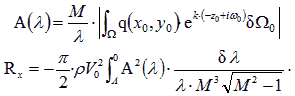
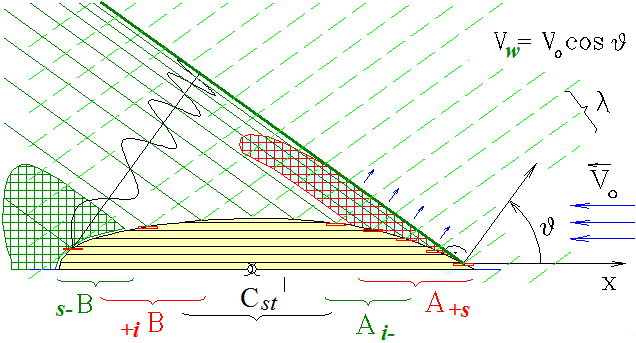
Search of optimal hull form of ship is carried out using theoretical integral of John Henry Mitchell (1898). Physical and geometric interpretation of this integral permits to understand interrelation between ship waves generation at a high ship speed on calm sea and power influence on ship hull from intensive sea waves. In Michell’s fluidmechanics discovery where are fully mathematical tools and physical principles for contradictory designing and experimental optimization of ship hull form, against distribution of fluidmechanics forces along ship hull, which defined solely geometric particularity of ship lines.
 - ratio of maximal L and axial l wave lengths;
- ratio of maximal L and axial l wave lengths;
 - wave frequency; k = 2·p/l – wave's number.
- wave frequency; k = 2·p/l – wave's number.
Physical-geometric interpretation of fluid dynamic processes at Michell’s integral will present a particular mechanism for external sea wave reflection with shipboard reaction, which run up with slanting angles: J, within the range of lengths: l Î [ 0 ¸ L = 2×p×V02/g], where: L - a length of the maximal transverse ship's wave, corresponding to speed of ship V0. In computation is taken that on hull extremity a ship’s waves can’t come off from shipboard, and wave processes are changed by shock summation with short waves amplitudes, and according wave transformation near of bow surface, in the form of simple liquids source.
At particular case, for analysis of origin rolling momentum of forces and ship lines optimizing, may be simulating hull transverse wave’s flow under ship bottom, and search special form of hull, which make possibilities for minimal deformation of free sea waves, in their transmitting processes across ship hull. This condition accords to minimal wave forces reaction, and may be reasonable for large stormy waves influence also.
3.1. Variant of ship hull without rolling |
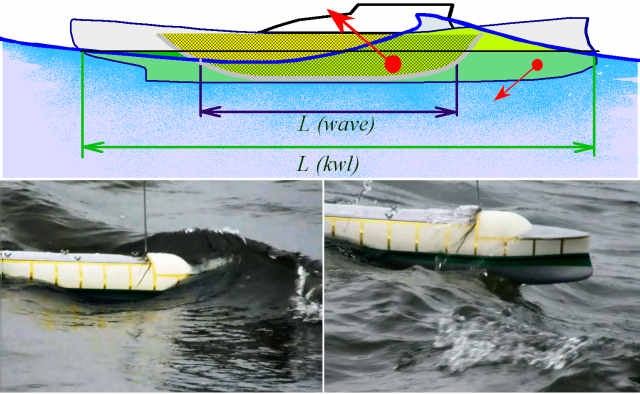
Intensive rolling of ship on any courses ahead on stormy seas may be excepting, if make a tumblehome board of the order 10-20 degrees (Fig. 9) in middle part of shipboard. Maximal slope of board make enough only on waterline level, where is a point of inflection on frame section contour under negative surface curvature at shipboard. It allows to take special fluidmechanics particularities of a large stormy waves, always having trochoidal nature since sharing liquid particles with motion over cyclonical trajectory, where are maximal speed on peak of wave crest.
Progressive storm waves have a slow in down part, when it nearer to tumblehome shipboard surface. It produce the particularity fluidmechanics condition, under which all liquid flow of wave to rushes under bilge and bottom of the ship, which draught of hull must be approximately a half of ship hull width. This intensive wave’s stream brings about redistribution of hydrodynamics’ pressures, why, with provision for ship drift, replaced the critical point in field velocity currents to leeward board of ship, than is party compensated of hydrostatic moment of forces to windward list on sloping surface of the storm wave. Hangover of wave stream flow under bottom of ship, required also to forming viscosity forces on the board keels, since otherwise this keels produce a disadvantage list momentum of forces under the drift motion action.
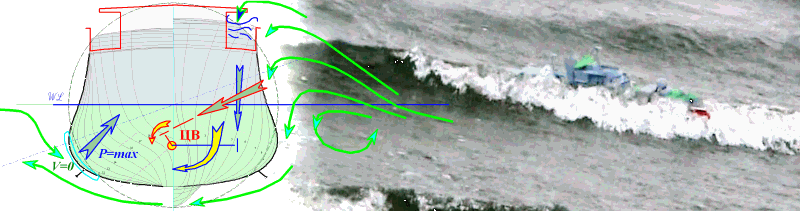
Ship hull with concave frame contours on the design waterline level, have a striking expressed acquisition by the S-shaped static stability diagram, that allows safely to reduce initial metacentre for the reason increasing of the rolling time period, without commonly reduction of the criterion for dynamic stability of the ship in stormy sailing condition as a whole.
Experimental investigation for the stormy ship seaworthiness with remote control models was executed on regular waves in towing tank (Fig. 9) and under fresh wind on Okhotskoye sea open surface. All testing got a fully confirm design decisions for decreasing of the ship rolling, when approached right result both: on fast speed ahead; and on emergency sailing without moving.
Video with seaworthiness experiments for the special remote control models are published on: http://www.youtube.com/Khramushin. Titles of clips is: «Ship with small rolling on heavy waves in towing tank» (01:40); and «Historical Ship on Hurricane Storm Waves» (06:35).
3.2. Ship with small pitching at full speed ahead on stormy seas |
Invention application RU-2007133625 from 07.09.2007.
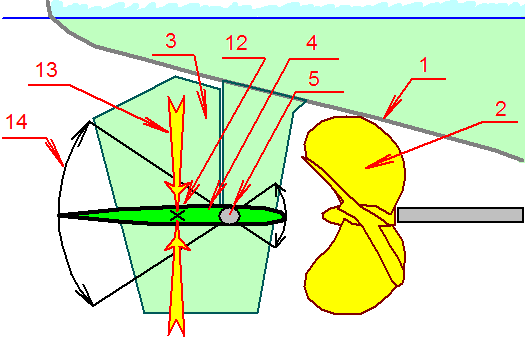
For exception of intensive pitching need to using backwards stem and small freeboard volume in bow of ship hull. Formally this promotes hydrostatic effects for reduction of heaving forces on a fast motion sea surface under heavy storm condition. Pitching stabilizations for ship at fast speed ahead must be approach by using special vortices form of underwater bow bilges of hull, which forming by a gliding twisted surface for influx liquid from up waves flow, and redirecting it under bow bilge of the hull, which occur strongly in place of the forming first ship’s breaking wave crest (Fig.6).
Vertical heaving not so heavily reflects on surging and losing of speed ahead of ship, and as a whole, she not so is heavily reflected on the conditions of habitability inward of ship hull and superstructures.
Full pitching avoidance is very important achievements (Fig. 10), and special optimizing design for ship without pitching will capable additional seakeeping qualities also:
v - maintain the high speed of ship at storm weather condition;
v - following any course on large stormy waves;
v - useful reduce a space-flooding on upper decks;
v - completely excluded a burying bow deck of ship under large and freak-wave;
v - avoid the dangerous capture of the ship by large wave ridges;
v - reduce the accelerations inward of ship hull; perfect safety and reliability of the shipment fastening.

Video from experimental searches publish in the same place on YouTube: «China ship from Marco Polo with Flapping Wing Propulsion.» (02:20), and «China-1275 from Marco Polo's Map with Ship on Pacific Ocean» (02:25).
Design for optimal hull form may be founded on special computational experiment for analyze of series results with simplest form or next elements of ship hull form. More important problem for computational researches is: 1) decreasing or full excluding a trim difference of ship at her full speed ahead; 2) minimizing ship waves radiation for full range of ship speed, including over critical speed of sailing on calm water, in which produced ship waves with comparable length for external sea stormy waves. In physical experiments is confirmed that specified numerical minimization for trim difference, after significant reducing a pitching of ship on a real stormy waves.
In the event of loss way, the hull stabilization effect disappears, and ship newly regain wholly appreciable pitching. Enhanced stormy seakeeping can reached high propulsion and small pitching at full speed ahead on rough seas. This qualities accept to use special lines of hull form under stern afterrake, that ensured particular condition for helm and screw propeller. In this case, emergencies and loss way will be aggravated by dangerous amplification of the storm wave’s power influence to stern extremity of the ship.
However, exactly intensive vertical heaving of stern afterrake under blow of stormy waves is effective actuation of passive flapping propulsor, as which can using the active wings stabilizer for pitching and rolling.
3.3. Active wing stabilizer for pitching and rolling – emergency stormy propulsor |
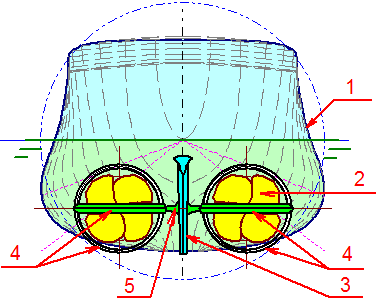
At stormy condition stabilized by direction water flow to liquids near ship hull, going speed ahead, there is under stern afterrake only, directly after operating screw propellers. Exactly here (Fig. 11) possible to obtain of the most power for active stabilization of the list and trim difference of ship, including at the calm weather on the sharp circulation.
At event of loss way, the stern extremity of ship gets the significant vertical heaving fluctuations under influence of the storm waves, it’s stipulated of wide waterlines and large freeboard volume above stern afterrake, which made for ensuring intact boundary stream to helm and screw propellers. Such heaving is a necessary condition for operate of free-springy wings as a passive flapping wings propulsor, which are actuated at the most dangerous sailing on stormy seas after main engines stopped. Passive flapping propulsor does not require additional power or controlling influence on wing device, and free-springy rotation (backlash) of wheels at angle to ±30° will simultaneously insure the ship at shock influence to board of ship from stormy waves, that is important for the active stabilization of heaving at full speed ahead.
Analytical and experimental studies of stormy seakeeping of ships and vessels of the different purpose has a results of the key concepts for contradictory designing of ship architecture and lines of hull, further to propulsions, fluidity rolling and pitching and safety sailing on heavy storm seas.
Seakeeping experiments for special remote control models of seagoing ships with telemetric measuring system on regular waves in towing tank of Komsomolsk-on-Amur state technical university, and following proving their under wind on open sea at seasides of Sakhalin isl., was confirm a fully satisfactory nautical qualities for all optimized ship models.
The complete determination of design solving will offer new technical decisions to active stabilization of the residual rolling and pitching ship at speed ahead. As it supposes of maritime experience, the draft a wing stabilizers as well emergency stormy propulsors, what became a development of contradictory designing principles for shipbuilding and marine seagoing.
This shipdesigning researches was initiated by marine tutors – navy officers of Kaliningrad Marine College (1975) and continued with the professors of the Leningrad Shipbuilding Institute (1985). These results was supported by government order from Russia Main management of shipbuildings (2000), and follow of present state by means of enlightening grant from oil company “Sakhalin energy”, which perform by Sakhalin division of Russian geographical society (2004).
The special gratitude authors expresses for Sergey Antonenko and Victor Bugaev (Department of Ship theory and designing of the Fareast State Technical university), as well as Nikolay Mytnyk and Nikolay Taranukha (Depth. of Shipbuilding of the Komsomolsk-on-Amur State Technical University) - as true coauthors for all new shipbuilding decisions
1. Khramushin V.N. Researches for stormy seakeeping of ship. Vladivostok: Dalnauka, 2003. 172 p. (www.shipdesign.ru\History.html )
2. Michell, J. H. The wave resistance of a ship // Philosophical Magazine. – Ser. 5. – London: 1898. – Vol. 45. – P.106–123. (www. shipdesign.ru/JHM.html)
3. Khramushin V.N. Ship without rolling on stormy seas. Patent RU- 2360827. (www.shipdesign.ru/Invent/01.html, www.Youtube.com/Khramushin - «Ship with small rolling on heavy waves in towing tank», «Historical Ship on Hurricane Storm Waves»)
4. Khramushin V.N. Ship without pitching at speed ahead on stormy seas. Invention application RU-2007133625. 07.09.2007. Moscow. (www.shipdesign.ru/Invent/02.html, www.Youtube.com/Khramushin - «China-1275 from Marco Polo's Map with Ship on Pacific Ocean»).
5. Khramushin V.N. Active stabilizer pitching and rolling of ship – stormy emergency propulsor. Patent RU2384457.